Line Over Ground Truth loss
For the past 6 months, I have worked on shelf detection/enumeration. In our case, the main goal of shelf detection was to determine the ordinal number of the shelf on which the product is placed on (most bottom shelf (first), middle shelf (second), …). The exact and precise localization of the shelf bounding boxes wasn’t necessary. We have tried to apply some traditional computer vision methods to this problem but none of them proved to be robust enough to be used in an “in-the-wild” environment such as a store.
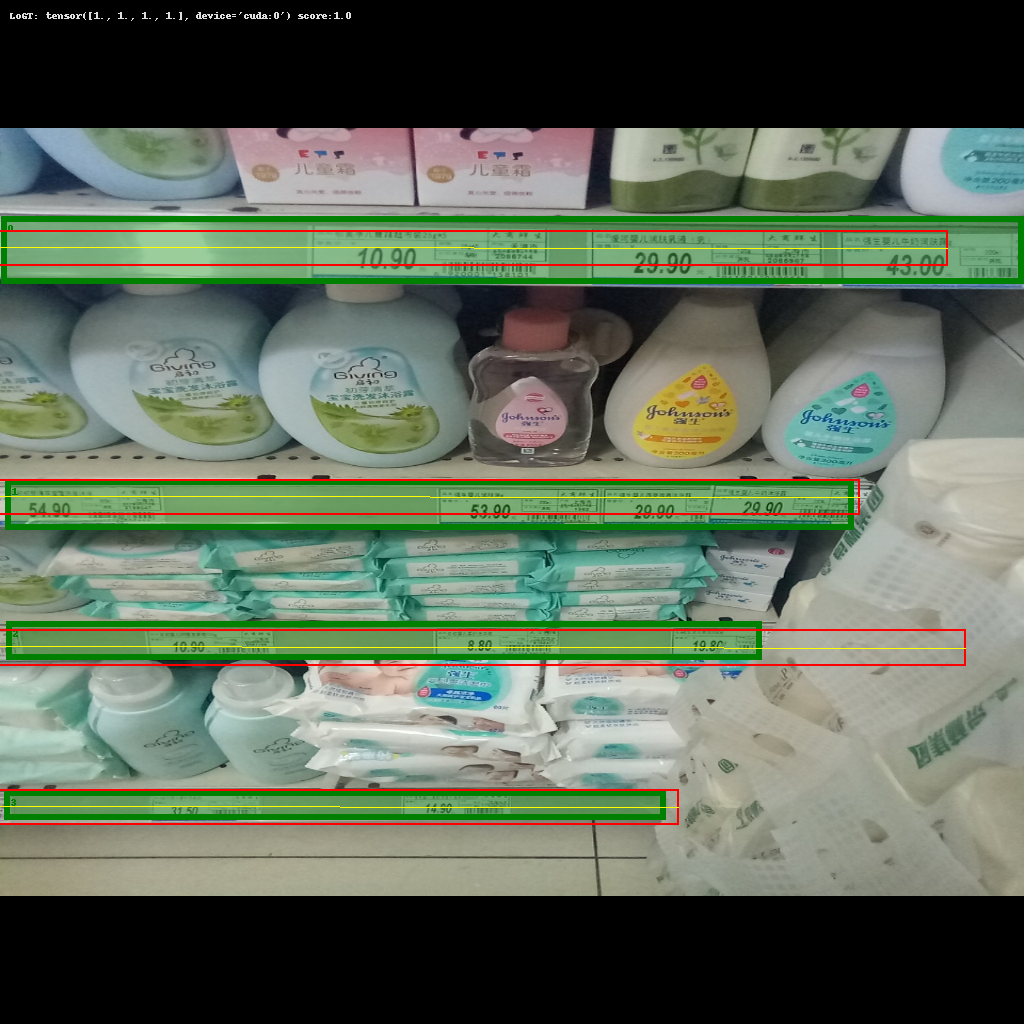
Image where mAP says these predictions are bad (beacuse of it being based on IoU) but in our specific case of shelf detection/numeration the predicted bounding boxes work just fine.
1. Introduction
I am proposing a new evaluation metric - LoGT, that represents the predicted bounding box as a line that is going through the middle of that bounding box. For a line that crosses the ground truth bounding box the value of LoGT is 1, otherwise it’s 0. Keep in mind this is purely an evaluation metric and training is still done using CIoU (me and my colleague tried to formulate our training loss but cIoU was simply better than anything we came up with :) ). This being a very simple 1-class object detection problem where even the simplest yolo network configuration achieves great results but requires a “large” amount of parameters. Using my previously proposed metric I managed to prune the memory footprint from 1.4M parameters (yolov5n, the smallest config you can find on the ultralytics yolov5 github repo) to a tiny yolov5femto/yolov5pico models of 30k/150k parameters, with the same FPN based architecture but significantly fewer filters in every convolutional layer, achieving nearly the same results on their in-house shelf detection dataset.
LoGT_matrix source code I will try to explain this code here
The general idea behind LoGT as a loss is that if a prediction desrcibed as a line passes through the ground truth bounding box the result is satisfactory. It is designed for problems where exact localization of the object isn’t necessary. A potential problem I encountered for this metric is data where there is high overlap between bounding boxes. I think maybe two-stage detectors wouldn’t have these issues, further research required
2. Explanation
I will try my best to explain how i imagined LoGT loss on an example. It is similair to IoU. So far it is only discrete, it could be continuous in the future but I’m not sure how much it matters since i only use it as an evaluation metric. Let’s say you have G ground truth bounding boxes and P predictions. We construct a LoGT matrix where each row is a predicted bounding box, and each column is a ground truth bounding box. The matrix shape is PxG. Element (i,j) of that matrix is the LoGT metric between that prediction and the ground truth.
The First thing to do is deconstruct the prediction bounding boxes into lines, this could be something else but i decided to KISS (so far, I felt there was no need to complicate things on a simple task such as shelf detection).
def overlap(line, ground_truth_bbox):
#assume that ground truth bounding boxes are defined with 2 points, bottom-left and top-right
#we say that a line overlaps a bounding box if its y coordinate is between the the two y coordinates of the bounding box
if ground_truth_bbox.y1 < line.y < ground_truth_bbox.y2:
return True
else:
return False
P = bboxes_to_lines(predictions) # represent predicted bboxes as a single line going through the middle of that box
LoGT_matrix = zeros(P,G) # [PxG] skeleton
for line in P:
for ground_truth in G:
if overlap(line,ground_truth):
LoGT[j,i] = 1
else:
LoGT[j,i] = 0 # it already is 0 but leaves room for future code when maybe i don't want it to be discrete
3. Example
Consider an example like this: green are the ground truth bounding boxes, and red are your predicitons. They are indexed with numbers so it’s more intuitive to follow the rows and columns.
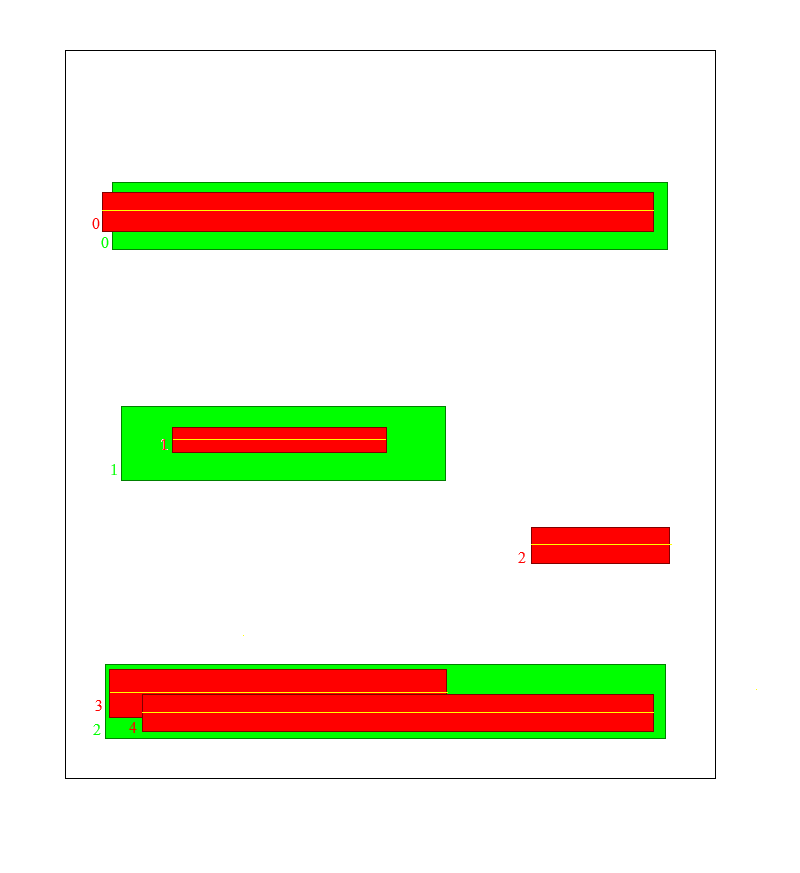
This is how we want the LoGT matrix to look like after the algorithm runs on the above described data, notice 1 false positive and 2 bounding boxes for the same shelf. They are the the last three rows of this matrix
The above written pseudocode will behave like this
This gif visually emulates how the algorithm behaves
Notice that the third row is filled with zeroes, that is the false positive bounding box (index=2). Now We need to pad the matrix with null-columns until it is square. This lowers the score for the false predictions. Keep in mind that situation such as shelf 3 and 4 can be avoided in the yolo architecture by setting the non-maximum-supression IoU threshold to be very low.
if len(P) > len(G):
LoGT_matrix = concat((LoGT_matrix, zeros((P.shape[0], P.shape[0] - G.shape[0]))), dim=1)
after this our matrix looks like this, in order to calculate the final LoGT score we just sum by the columns and voila - we have our LoGT vector.
\[\begin{bmatrix} 1 & 1 & 2 & 0 & 0\\ \end{bmatrix}\]Final metric calculation pythonic code
LoGT_vector = sum(LoGT_matrix, dim=0)
if calculate_score:
correct_predictions = count_nonzero(LoGT_vector)
LoGT_score = correct_predictions / LoGT_vector.shape[0]
4. Future Work
Here i list my plans for future work regarding the LoGT loss
- keep developing this as an eval metric with the goal of pruning object detection models which can sometimes be unnecessarily large
- fiddle around with more complex representations of the bounding box, not just as a line going through the middle
- figure out if I want LoGT to be stricly discrete or maybe make it continuous(derivable) somehow.
- test out LoGT on two-stage object detection models
- maybe this whole padding with zeores thing when you have predictions than GT boxes is not the best way to do it. I think that a simple transpose could do the trick
If you have any suggestions or critiques on this work feel free to contact me at jeronim96@gmail.com